Version 6.1, 21.06.2008, MathCad 14.0
Copyright Peter Lürkens, 2008
luerkens.homepage.t-online.de/peter
www.ftha.de
Der Ablauf des Windenstartvorganges eines Segelflugzeuges ist ein komplexer Vorgang der von vielen Parametern beeinflusst wird. Beim Windenstart wird als Ersatz für einen eigenen Antrieb durch das Windenschleppseil eine Kraft in die Schwerpunktkupplung des Flugzeuges eingeleitet. Wie der Name schon sagt, liegt diese Kupplung in der Nähe des Flugzeugschwerpunktes und damit auch in der Nähe des Druckpunktes. Daher entstehen auch bei erheblichen Kräften nur geringe Drehmomente um die Flugzeugquerachse, so dass das Flugzeug mit Hilfe der Höhensteuerung zu erheblichen Winkeln gegenüber dem Seil eingestellt werden kann. Zunächst steht das Flugzeug auf dem Boden, das Seil verläuft dann nahezu parellel zum Erdboden, jedenfalls spätestens dann, wenn das Seil straff gezogen wird. In dieser Phase wird das Flugzeug zunächst horizontal beschleunigt, bis dass die Abhebegeschwindigkeit erreicht wird. Im Folgenden stellen nun Windenfahrer und Pilot gemeinsam die Fluggeschwindigkeit auf einen bevorzugten Wert ein.
Während der Steigflugphase ergibt sich ein mehr- oder weniger großer Winkel zwischen der Seilkraft und der Flugzeugbewegungsrichtung. Teilweise resultiert die Seilkraft in einer Vortriebskomponente, zu einem anderen Teil addiert sie sich zur Gewichtskraftkomponente hinzu.
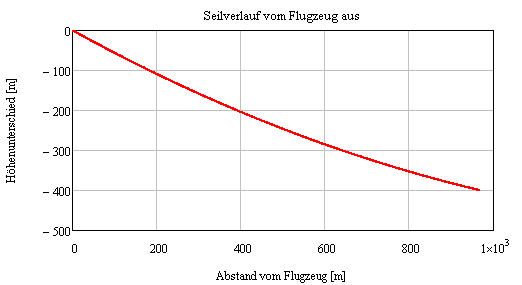
Da das Seil nicht massefrei ist ergibt sich in der Regel außerdem ein Seildurchhang, der dazu führt, dass der Seilwinkel am Flugzeug steiler ist, als der Winkel einer direkten Linie von Winde zu Flugzeug. Die Folge ist, dass die Richtung der Seilkraft eine größere Komponente nach unten hat, was für den Windenstart etwas ungünstiger ist.
Ein weiteres Problem ist die Einstellung der korrekten Seilkraft. Ein einfaches Regelprinzip ist, dass bei Überschreitung der gewünschten Fluggeschwindigkeit der Windenfahrer die Seilzugkraft verringert, wärend bei einem Unterschreiten der Pilot den Flugzeuganstellwinkel reduziert. Dies ist in der Praxis nicht trivial, da es keine oder nur eingeschränkte Kommunikationsmöglichkeiten zwischen Pilot und Windenfahrer gibt. Im Rahmen dieses Berechnungsprogramms jedoch ist dies Problem relativ einfach lösbar, da jederzeit alle Zustandsdaten bekannt sind. Zuletzt ist die Seilkraft mit Hilfe einer Sollbruchstelle nach oben hin begrenzt, um Überlastungen des Flugzeuges zu vermeiden.
Daher ist es a-priori nicht einfach, vorherzusagen, wie genau sich die einzelnen Einflussgrößen, wie Drehzahl-Drehmoment-Verlauf, Seilgewicht, Flugzeugmasse und ~Polare und Windkomponente auf den Verlauf des Startvorganges und die erzielbare Ausklinkhöhe auswirken.
In diesem Ansatz wird daher versucht, den Startvorgang möglichst genau zu berechnen, unter Einbeziehung einer realistischen Drehzahl-Drehmoment-Kennlinie, der Flugzeugpolare und des Seildurchhanges. Bestimmte Parameter, wie die Windkomponente und die vom Piloten gewünschte Fluggeschwindigkeit können vorgegeben werden. Es sind jedoch nicht alle Details berücksichtigt, so wird zum Beispiel die Masse des Schleppseils und das Trägheitsmoment der Windenmechanik (Motor, Getriebe und Seiltrommeln) bei Beschleunigungsvorgängen vernachlässigt. Allerdings ist Drehzahlbeschleunigung der Winde, abgesehen vom Anrollvorgang eher gering, so dass der Einfluss auf den Startvorgang insegesamt als weniger bedeutend angesehen wird. Des weiteren wird der Einfluss einer Seitenwindkomponente nicht berücksichtigt.
Als bekannt wird hierzu die Positionen von Seilanfang und ~Ende sowie die Zugkraft am Seilanfang vorausgesetzt
Die Kraft am Punkt P1 sei F1. Diese wirkt in die Seilrichtung am Punkt P1. Die Kraft am Punkt P2 wirkt ebenfalls in Seilrichtung. Beide Kraftvektoren wirken auf das Seilelement ein. Insbesondere müssen die statischen und dynamischen Kräfte auf das Seilelement ausgeglichen werden. Die statischen Kräfte werden durch die Gewichtskraft des Seils festgelegt. Die dynamischen Kräfte entstehen durch die Seilbeschleunigung. Diese soll hier vernachlässigt werden, da angenommen wird, dass die dynamischen Kräfte gering im Vergleich zu den statischen sind. Das heisst, dass Fa = 0 ist und Fg die Gewichtskraft des Seilelements. Das bedeutet nun, dass die Gewichtskraft durch die unterschiedlichen Seilrichtungen am Anfang und Ende des Seilelementes gebildet werden muss.
Für ein langes Seil, dass an zwei Punkten aufghängt ist und im dynamischen Gleichgewicht ist, muss gelten, dass die Kraft in Horizontalrichtung an beiden Enden gleich ist. Anderenfalls würde das Seil eine Richtung beschleunigt. Damit ist die Horizontalkomponente and beiden Enden bekannt.
Die beiden Vertikalkomponenten ergeben insgesamt die Seilgewichtskraft. Allerdings sind die beiden Einlaufwinkel nicht bekannt.Diese wären gleich, wenn beide Endpunkte des Seiles auf gleicher Höhe sind, was natürlich nicht vorausgesetzt werden kann. In diesem Fall lassen sie sich jedoch in einfacher Weise aus der Zugspannung aus der Gewichtskraft und resultierenden Winkel bestimmen.
Auch wenn sich das Seil in vertikaler Lage befindet sind die Winkel bekannt, nämlich 90° und der Kraftverlauf im Seil lässt sich leicht bestimmen.
Es ergibt sich nun die Frage, ob der Seilververlauf in allen Punkten bestimmt werden muss, um die Kräfte an den Endpunkten zu bestimmen.
Es ergibt sich für ein Seilstück der Länge l:
Für dieses Integral existiert eine geschlossene Lösung für positive Seilkräfte und Werte von a1 und a2 in den rechten Quadranten (-π/2 < α < π/2):
Es ist außerdem möglich den Anfangswinkel a1 zu bestimmen für den Fall, dass bei gegebener Seillänge und Seilkraft eine bestimmte Flughöhe y gegeben sein soll:
Als Letztes verbleibt die erforderliche Seillänge, um bei gegebener Seilkraft und Y-Koordinate des Flugzeuges die tatsächliche X-Koordinate zu erreichen. In dem vorliegende Fall ist dies Ergebnis allerdings so komplex, dass eine numerische Lösung vorzuziehen ist:
Seilwinkel an der Winde und am Flugzeug,i.A. von der Flughöhe y, der Seillänge L und der Windenzugkraft F1
Seillänge i.A. von der Windenzugkraft F1, der Flughöhe YL bei vorgegebenem Horizontalabstand des Flugzeugs von der Winde X
Vertauscht man die Rolle von Winde und Flugzeug lassen sich auch vom Flugzeug aus die Seilkräfte und Winkel an der Winde berechnen. Dazu ist lediglich das Koordinatensystem zu transformieren, so dass die Höhe des Seilendes nun negativ wird (d.h. die Winde befindet sich unter dem Flugzeug).
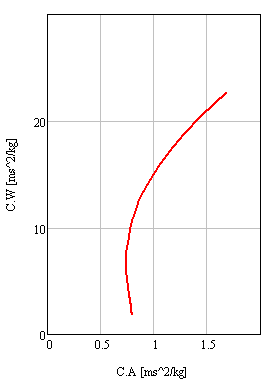
Ein weiteres wesentliches Element im System ist das Flugzeug selber. Das Verhalten eines Segelflugzeuges läßt sich wesentlich durch seine sog. Polare beschreiben. Die Polare gibt den Zusammenhang zwischen Auftriebs- und Wiederstandsbeiwert CA und CW an. Sie ist gewöhnlich mit dem Anstellwinkel parametriert. Allerdings ist die Wahl des Polarenparemeters im Prinzip beliebig. Letztlich können aus der Polare viele Eigenschaften berechnet werden, z.B. die Sinkgeschwindigkeit in Abhängigkeit von Gewicht und Fluggeschwindigkeit. Ebenso lässt sich aus der Gleitzahlkurve die Polare berechnen.Dies wird hier ausgenutzt, da sehr häufig nicht die Polare selbst vom Hersteller angegeben wird sondern das Eigensinken über der Geschwindigkeit. Als Beispiel soll hier ein Grob TWIN-ASTIR angenommen werden. Für die Kräfte am Flugzeug gilt:
Im antriebslosen Bahnneigungsflug muß am Flugzeug ein Kräftegleichgewicht vorliegen, bei dem die Gewichtskraft durch die Kombination von Auftrieb und Widerstand ausgeglichen werden muß. Die Leistung, die aus der Gewichtskraft und dem Eigensinken erzeugt wird entspricht genau dem Produkt aus Bahngeschwindigkeit und Widerstandskraft. Beim Windenstart iswt allerdings noch ein weiterer Widerstand zu berücksichtigen, nämlich der des Seilfallschirmes, der, obwohl nicht entfaltet, wesentlich zum Gesamtwiderstand beiträgt.
Die Vertikalkomponente der Auftriebskraft muß dem Flugzeuggewicht entsprechen.
Ableitung der Polarenkomponenten, als Polarenparameter wird hier die Fluggeschwindigkeit bei Nennmasse gewählt. Diese kann später auch benutzt werden um den zulässigen Anstellwinkel so zu begrenzen, dass ein Strömungsabriss ausgeschlossen ist.
Während des Windenstarts wird zusätzlich die Seilkraft S in das Flugzeug eingeleitet. Für das Flugzeug gilt auch hier, dass im stationären Zustand das Kräftegleichgewicht von Auftrieb A, Widerstand W, Gewicht G und Seilkraft S gegeben sein muß. Im beschleunigten Zustand ist das Kräftegleichgewicht nicht ausgeglichen, sondern führt zu Veränderungen des Fluggeschwindigkeitsvektors v. Der tatsächliche Flugzustand wird durch den Parameter v' beschrieben der bei einfachem Lastvielfachen und Nenngewicht der Fluggeschwindigkeit entspricht, aber in auch ein Maß für den Anstellwinkel darstellt. Dieser Wert wird durch den Piloten mit Hilfe der Höhensteuerung verändert. Im Prinzip ist dies eine freie Größe, zumindest solange bis entweder die maximale Belastbarkeit des Flugzeuges oder jedoch die Leistungsfähigkeit des Windenantriebes überschritten wird oder aber der zulässige Bereich der Fluggeschwindigkeit verlassen wird.
Der Winkel a2 hängt von der restlichen freien Seillänge, der Flugzeugposition und der Seilkraft ab. av ist der Winkel des Geschwindigkeitsvektors und ergibt sich aus der Integration der Beschleunigung. Es verbleibt der freie Parameter v', der ein Maß für den Profilanstellwinkel ist.Mit ihm kann die Seilkraft S zwischen Beschleunigung und Auftrieb verteilt werden.
Es wird davon ausgegangen, dass es sinnvoll ist, bis zu einer Geschwindigkeit vmin die ganze Seilkraft in die Beschleunigung umzusetzen um danach mit erhöhtem Anstellwinkel den Steigflug durchzuführen. Es wird angenommen, dass die maximale Seilkraft dabei aufrechterhalten wird solange die zulässige Fluggeschwindigkeit nicht überschritten wird.
Solange YL <= 0 ist und ax <= 0 ist wird vy zu Null gesetzt, da das Flugzeug auf dem Boden steht.
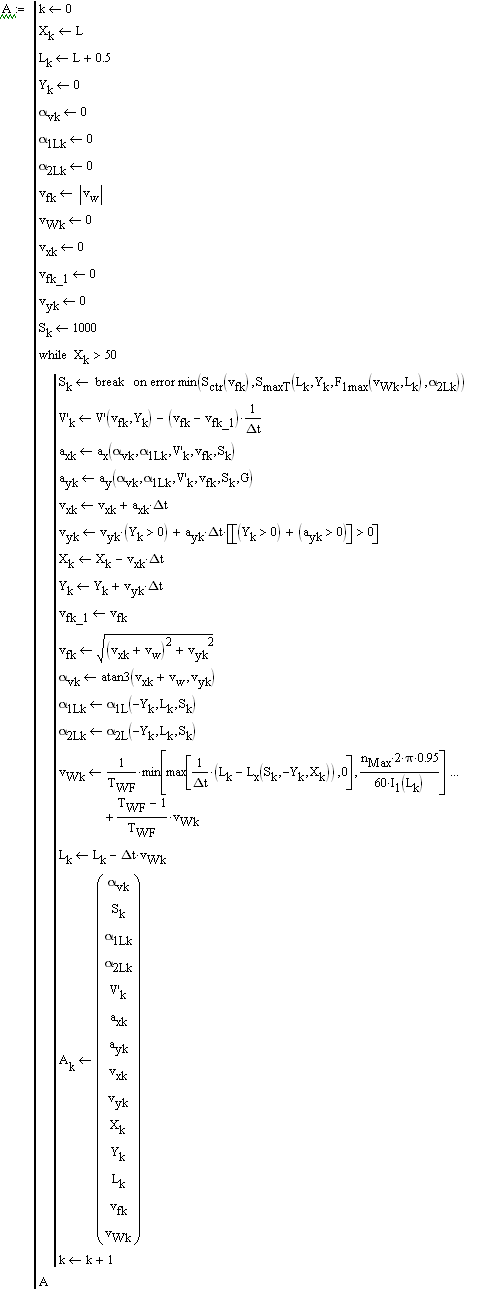
Es ergibt sich daher folgender Satz von Differentialgleichungen:
Die Regelung der Fluggeschwindigkeit durch den Piloten erfolgt wie oben bereits angedeutet durch die Höhensteuerung. Insbesondere lässt der Pilot den Steuerknüppel nach und erhöht damit v', wenn die Fluggeschwindigkeit absinkt. Dadurch wird das Flugzeug beschleunigt. Wenn die Fluggeschwindigkeit hoch genug ist, kann der Pilot stärker ziehen, also wird der Parameter v' verringert. Da v' die den Anstellwinkel und die Fluggeschwindigkeit bei einfachem Lastvielfachem repräsentiert, darf v' nicht unter die Überziehgeschwindigkeit sinken.
Überziehgeschwindigkeit, unterhalb dieser Geschwindigkeit erfolgt ein Strömungsabriss und das Flugzeug fliegt nicht mehr
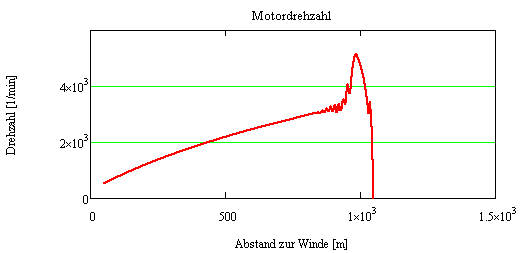
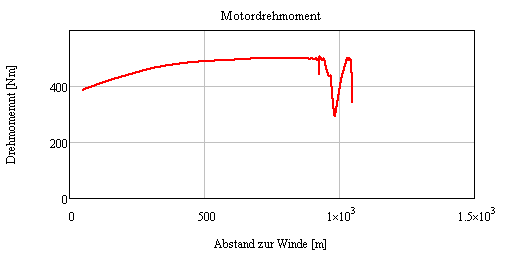
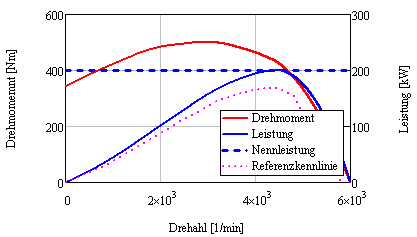
Der letzte wesentliche Punkt ist die Charaketeristik der Winde selbst. Diese ist im Wesentlichen bestimmt durch den Drehmomentenverlauf des Motors, der Getriebeüersetzung und dem Wickelradius der Seiltrommel. Ausserdem wird der Startvorgang durch die Trägheitsmomente, die Drehmomentenwandlercharakteristik, Seilelastizität und Wirkungsgrade beeinflusst. Wie oben bereits erwähnt, werden die Trägheitsmomemente aus Gründen der Vereinfachung nicht berücksichtigt. Außerdem wird die Seilelastizität (Dehnung bis zu ca. 15 m) vernachlässigt sowie die Drehmomementverstärkung des Wandlers. Berücksichtigt werden jedoch die Wirkungsgrade und die Seilreibung auf dem Boden, solange der windenseitige Seilwinkel negativ ist.
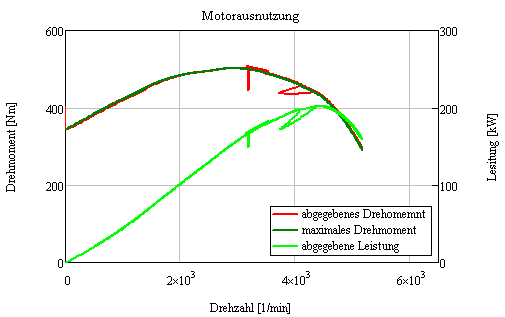
Als ein typischer Drehmomementenverlauf wird die Drehzahl-Drehmomement Kurve des Motors Opel-Diplomat 5,4 l mit maximal 435 Nm und 230 PS/170 kW zugrunde gelegt. Die Drehmomementenkurve für andere Motoren wird hiervon abgeleitet.
Formkoeffizient k der Drehzahl-Drehmoment-Kennline
Hiermit wird der Verlauf der Drehzahl-Drehmoment-Kennlinie so angepasst, dass sich bei vorgegebenem maximalem Drehmoment, maximaler Drehzahl die maximale Leistung ergibt.
Maximale Seilkraft am Flugzeug:
(solange das Seil den Boden berührt wird die Gleitreibung mit berücksichtigt, die die maximale Seilkraft am Flugzeug verringert.
Die Berechnung des Startvoganges besteht nun in der Aufintegration der obigen Differentialgleichungen und der Berechnung erforderlicher Zwischenwerte wie Seilwinkel, Seillänge, Seilzugkraft etc.. Wie oben erwähnt werden die Windenträgheitsmomente beim Beschleunigen nicht berücksichtigt. Eine Anpassung des Seilreibungskoeefizienten könnte hier eventuell einen Ausgleich schaffen. Im weiteren Verlauf des Schlepps dürften die Trägheitmomemente auch keinen allzu großen Einfluss mehr haben, da die Drehzahlbeschleunigung hier nur noch gering ist.
Glättung der Windengeschwindigkeitsberechnung, wegen Stabilitätsproblemen bei der Rückwirkung des drehzahlabhängigen Drehmomements.
3*): Berechnung der Seileinzugsgeschwindigkeit aus der Änderung der freien Seillänge bei bekannten Position und Kräften ("inverse Berechnung"). Nach oben begrenzt durch die maximale Windendrehzahl, Übersetzung und Wandlerschlupf (0.95)
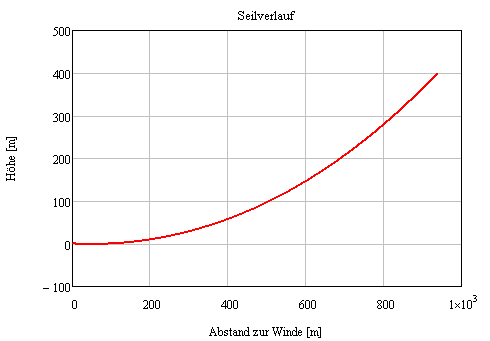
Es wurde ein Verfahren angegeben zur Berechnung des Ablaufs eines Windenstarts eines Segelfugzeuges unter Berücksichtigung der wesentlichen Einflussfaktoren Winden- und Fluzeugcharakteristik, Seileigenschaften und Windeinfluss. Die Ergebnisse sind realistisch und enrsprechen (ohne detaillierte Messung) praktischen Erfahrungen.
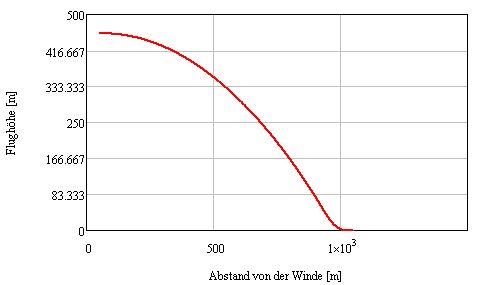
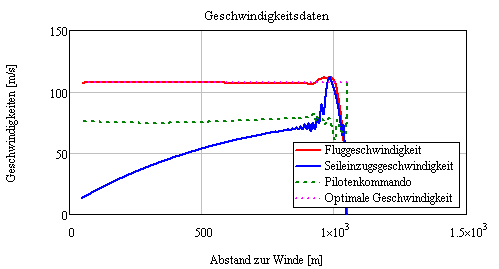
Die Berechnung ergibt, dass das Flugzeug während des gesamten Startverlaugfs mit der optimalen Geschwindigkeit fliegt, während der Windenmotor während nahezu der gesamten Schleppdauer das jeweil maximale Drehmoment liefert. Eine Vergleichsrechnung mit einem 50% leistungstärkeren Motor ergibt im Vergleich hierzu nur einen zusätzliche Ausklinkhöhe von nur 25 m. Dabei wird das maximale Drehmoment kaum noch ausgenutzt. Der hier betrachtete Motor kann daher als nahezu optimal angepasst angesehen werden.
Die Vereinfachungen bei der Implementierung der Dynamik der Winde (Vernachlässigung der Trägheitsmomente) führt in Verbindung mit der Rückwirkung des Abhängigkeit des Drehmomentes von der Drehzahl in Verbindung mit der inversen Berechnung (Differenzierung) der Seileinzugsgeschwindigkeit zu Stabilitätsproblemen, die behelfsmäßig durch Einführung einer Glättung gelöst werden konnten. Ein vollständigere Betrachtung der Windendynamik würde dieses Problem zwar lösen, gleichzeitig aber ähnliche Schwierigkeiten bei der Implementierung des Windenseilkraftreglers verursachen.
Tatsächlich berücksichtigt ein realer Windenfahrer bei der Steuerung der Winde außer Messwerten (Drehzahl) und sensorischen Eindrücken (Motorgeräusch, Vibrationen, Rückstellkraft und Stellung des Gashebels, Seildurchhang, Lage des Flugzeuges) in umfangreicher Weise Erfahrungen die in einem einfachen mathematischen Modell nur sehr schwierig realisiert werden können.
















































































































 z.B. wg. Wasserballast)
z.B. wg. Wasserballast)